
基于PLC的小型搬运机械手控制系统设计(含CAD梯形图,接线图,装配图)

基于PLC的小型搬运机械手控制系统设计(含CAD梯形图,接线图,装配图)(论文说明书16000字,CAD图纸4张)
中文摘要
本文简要介绍了小型搬运机械手的概念,机械手的组成和分类,机械手的自由度和坐标形式,气动技术的特点,PLC控制的特点及国内外的发展状况。
本文对机械手进行总体方案设计,确定了机械手的坐标形式和自由度,确定了机械手的技术参数。同时,设计了机械手的夹持式手部结构,设计了机械手的手腕结构,计算出了手腕转动时所需的驱动力矩和回转气缸的驱动力矩。设计了机械手的手臂结构。
设计出了机械手的气动系统,绘制了机械手气压系统工作原理图,对气压系统工作原理图的参数化绘制进行了研究,大大提高了绘图效率和图纸质量。
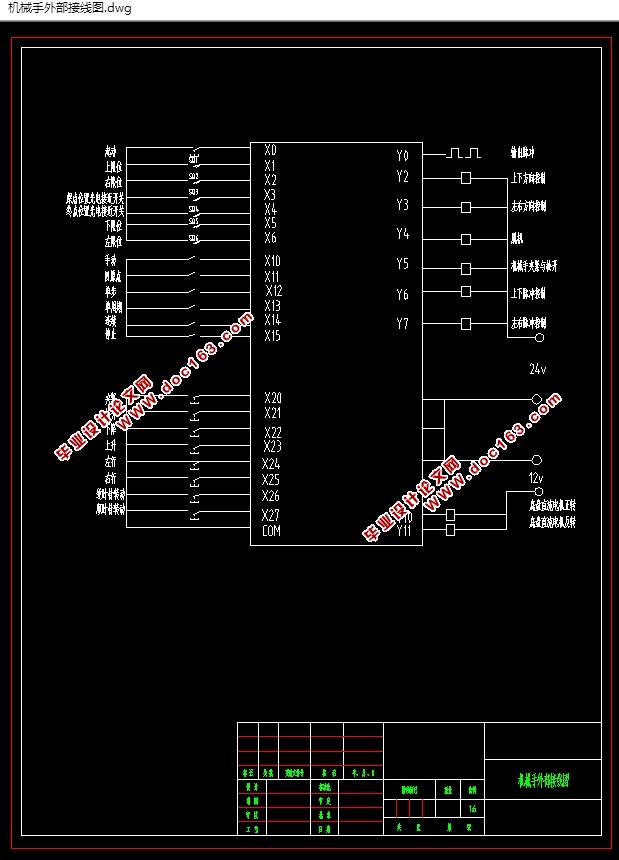
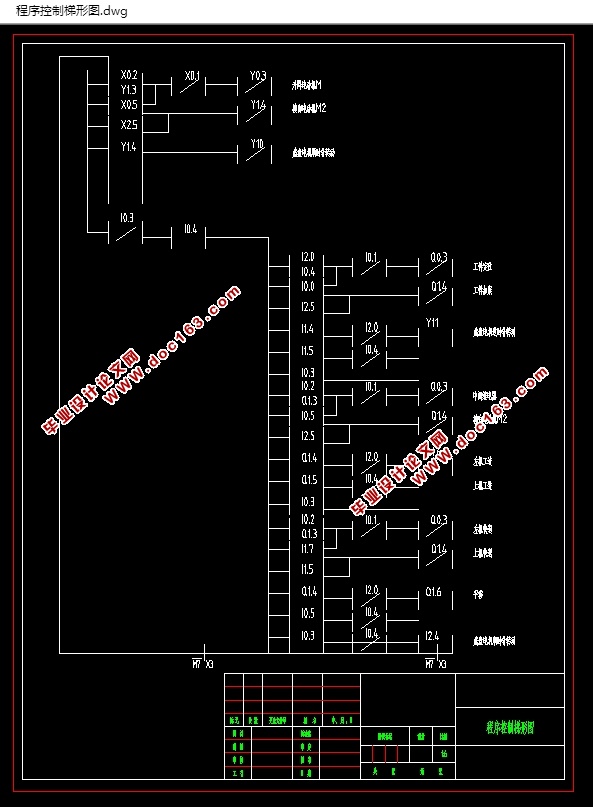
利用可编程序控制器对机械手进行控制,选取了合适的PLC型号,根据机械手的工作流程制定了可编程序控制器的控制方案,画出了机械手的工作时序图,并绘制了可编程序控制器的控制程序。
关键词 小型搬运机械手,机械手,气动,可编程序控制器(PLC)
ABSTRACT
At first, the paper introduces the conception of the industrial robot and the eler. dary information of the development briefly . What’s more, the paper accounts for the background and the primary mission of the topic.
The paper introduces the function, composing and classification of the manipulator , tells out the free-degree and the form of coordinate . At the same time, the paper gives out the primary specification parameter of this manipulator,
The paper designs the structure of the hand and the equipment of the drive of the manipulator ,
This paper designs the structure of the wrist , computes the needed moment of the drive when the wrist wheels and the moment of the drive of the pump.
The paper designs the structure of the arm.
The paper designs the system of air pressure drive and draws the work principle chart , the manipulator uses PLC to control . The paper institutes two control schemes of PLC according to the work flow of the manipulator . The paper draws out the work time sequence chart and the trapezia chart . What’s more , the paper workout the control program of the PLC ,
KEY WORDS : industrial robot, manipulator , pump , air pressure drive , PLC [来源:http://Doc163.com]


[来源:http://www.doc163.com]
目录.......................................................................................................................1
文摘.......................................................................................................................3
Abstract..................................................................................................................3
第一章 绪论.......................................................................................................4
1.1机械手概述...............................................................................................4
1.2机械手的组成和分类...............................................................................4
1.2.1机械手的组成................................................................................5
1.2.2机械手的分类……………………………………………..........6
1.3国内外发展状况.. ...............................................................................................7
1.4课题的提出及主要任务………………………………………………..8
1.4.1课题的提出……………………………………………..............8
1.4.2课题的主要任务……………………………………………......9
第二章 机械手的设计方案…………………………………………….............9
2.1机械手的座标型式与自由度……………………………………….....10
2.2机械手的手部结构方案设计……………………………………….....11 [来源:http://www.doc163.com]
2.3机械手的手腕结构方案设计……………………………………….....13
2.4机械手的手臂结构方案设计……………………………………….....14
2.5机械手的驱动方案设计…………………………………………….....15
2.6机械手的控制方案设计…………………………………………….....17
2.7机械手的主要参数………………………………………………….....18
2.8机械手的技术参数列表…………………………………………….....19 [版权所有:http://DOC163.com]
第三章 手部结构设计……………………………………………....................20
3.1夹持式手部结构…………………………………………………….....21
3.1.1手指的形状和分类………………………………………….....22
3.1.2设计时考虑的几个问题…………………………………….....23
3.1.3手部夹紧气缸的设计……………………………………….....24
第四章 手腕结构设计…………………………………………………............26 [资料来源:https://www.doc163.com]
4.1手腕的自由度………………………………………………………....28
4.2手腕的驱动力矩的计算……………………………………………....29
4.2.1手腕转动时所需的驱动力矩…………………………………..29
4.2.2回转气缸的驱动力矩计算……………………………………..30
4.2.3回转气缸的驱动力矩计算校核………………………..............33
第五章 手臂伸缩,升降,回转气缸的设计与校核………………………......33 [资料来源:Doc163.com]
5.1手臂伸缩部分尺寸设计与校核…………………………………….....34
5.1.1尺寸设计……………………………………………...................35
5.1.2尺寸校核……………………………………………...................35
5 .1 .3导向装置……………………………………………...................36
5 .1 .4平衡装置……………………………………………..................37
5.2手臂升降部分尺寸设计与校核………………………………..................37 [资料来源:Doc163.com]
5.2.1尺寸设计……………………………………………..................37
5.2.2尺寸校核……………………………………………..................37
5.3手臂回转部分尺寸设计与校核……………………………………..........38
5.3.1尺寸设计……………………………………………..................39
5.3.2尺寸校核……………………………………………..................40
第六章 气动系统设计…………………………………………….......................41 [资料来源:http://doc163.com]
6.1气压传动系统工作原理图…………………………………………........42
6.2气压传动系统工作原理图的参数化绘制…………………………........43
第七章 机械手的PLC控制设计…………………………………………….......44
7.1可编程序控制器的选择及工作过程………………………………........45
7.1.1可编程序控制器的选择………………………………………..46
7.1.2可编程序控制器的工作过程…………………………………..47
7.2可编程序控制器的使用步骤………………………………………........48 [版权所有:http://DOC163.com]
7.3机械手可编程序控制器控制方案…………………………………........49
结论………………………………………………………………….....................50
致谢…………………………………………………………………………….....51
参考文献………………………………………………………………………….52 [资料来源:www.doc163.com]