
基于ARM的无人船自动航行控制器设计
资料介绍:
基于ARM的无人船自动航行控制器设计(任务书,开题报告,论文21000字)
摘 要
随着全球气候的恶化,人们对于自然环境的治理变得越来越重要,其中,对于湖泊、海洋环境的治理尤为重要。由于人工对湖泊、海洋的治理成本高、效率低,采用可以自动控制的无人船可以有效地提高工作效率。对于无人船自动控制的研究,也在一步步走向成熟。
本文主要介绍了一种基于ARM的无人船自动航行控制器的设计,其主要完成的工作有以下几点:
(1)使用ARM STM32开发板进行嵌入式编程,设计了一块以STM32F429芯片为内核的液晶显示控制终端。该控制端可以使用触摸滑块,用滑动滑块的方式控制无人船以向前行进、向后撤退、右转、左转的状态在水面上行进。同时该控制端可以接收来自无人船姿态传感器、GPS模块的数据并显示,以此监测无人船的状态。
(2)使用ARM STM32开发板进行串口编程,通过串口通信的方式获取姿态传感器、GPS模块的数据。通过姿态传感器陀螺仪获取的角速度积分获取俯仰角和横滚角,通过姿态传感器加速度计的数据判断初始状态是否水平,通过磁力计的磁感应强度信息进行反三角解算得到偏航角的信息。遵循了NMEA-0183协议获取具体的GPS经纬度信息。
[资料来源:http://www.doc163.com]
(3)制定了控制端到船体的运动指令,以帧的格式来向无人船发送运动指令,将向前行进、向后撤退、左转、右转这几种状态全部映射成帧指令。把控制端的滑块坐标信息与发送指令的内容一一对应,通过滑动滑块使其位置坐标信息改变,使无人船接收到不同的指令,以不同的运动状态、不同的航速进行航行。
(4)使用WIFI通信模块进行整个过程指令的发送、数据的传输。其基本的传输路径都是发送端使用串口把数据传到WiFi模块,WiFi模块把数据传到云端,接收的WiFi模块再从云端通过主题信息的识别把特定的数据通过串口发送给接收端。
通过以上工作的完成,可以在水面上控制液晶显示屏的滑块控制无人船以不同的运动状态运动,控制端可以显示来自船载姿态传感器和GPS的信息。控制人员可以根据这些姿态信息、GPS信息使用滑块对无人船进行微调,达到智能控制。
关键词:嵌入式编程;无人船控制;姿态采集
Abstract
As the global climate deteriorates, people's governance of the natural environment becomes more and more important. Among them, the management of lakes and marine environment is particularly important. Due to the high cost and low efficiency of artificial management of lakes and oceans, the use of unmanned vessels that can be automatically controlled can effectively improve work efficiency. Research on the automatic control of unmanned ships is also maturing step by step. [资料来源:http://www.doc163.com]
This paper mainly introduces the design of an automatic navigation controller for unmanned ships based on ARM. The main work done is as follows:
(1) Using the ARM STM32 development board for embedded programming, a liquid crystal display control terminal with STM32F429 chip as the core was designed. The control terminal can use the touch slider to control the unmanned ship to travel forward on the water surface by moving forward, retreating, turning right, and turning left. At the same time, the control terminal can receive data from the unmanned ship attitude sensor and the GPS module and display it to monitor the state of the unmanned ship.
(2) Using the ARM STM32 development board for serial port programming, and obtain the data of the attitude sensor and GPS module through serial communication. The pitch angle and the roll angle are obtained by the angular velocity integral obtained by the attitude sensor gyroscope, and the initial state is determined by the data of the attitude sensor accelerometer, and the information of the yaw angle is obtained by inverse triangulation calculation by the magnetic induction intensity information of the magnetometer. Obtain specific GPS latitude and longitude information according to the NMEA-0183 protocol.
[来源:http://www.doc163.com]
(3) The motion command from the control end to the hull is formulated, and the motion command is sent to the unmanned ship in the form of a frame, and all the states of forward travel, backward retreat, left turn, and right turn are all mapped into frame commands. The slider coordinate information of the control end is in one-to-one correspondence with the content of the transmission instruction, and the position coordinate information is changed by sliding the slider, so that the unmanned ship receives different instructions and navigates in different motion states and different speeds.
(4) Using the WIFI communication module to transmit the entire process command and transfer data. The basic transmission path is that the transmitting end uses the serial port to transmit the data to the WiFi module, and the WiFi module transmits the data to the cloud, and the received WiFi module sends the specific data through the serial port to the receiving end through the identification of the topic information from the cloud.
[来源:http://www.doc163.com]
Through the completion of the above work, slider on liquid crystal display can be used on the water surface to control the unmanned ship to move in different motion states, and the control end can display information from the ship's attitude sensor and GPS. The controller can use the slider to fine tune the unmanned ship based on the attitude information and GPS information to achieve intelligent control.
Key Words:embedded programming;unmanned boat control;attitude collection
[资料来源:www.doc163.com]

目 录
第1章 绪论 1
1.1 研究背景及意义 1
1.2国内外研究现状 1
1.3论文结构 3
第2章 无人船系统总体设计 4
2.1 系统需求及可行性分析 4
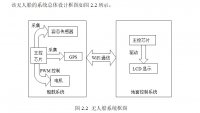
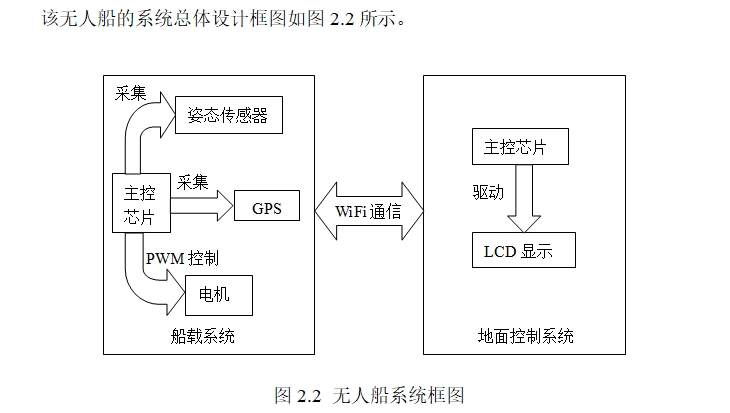
2.2系统总体设计 6
2.3电机的驱动 6
2.3.1 电机的基本原理和选型 6
2.3.2 电机的驱动设计 8
2.4 姿态数据的获取 9
2.4.1 姿态传感器的基本知识 9
[资料来源:https://www.doc163.com]
2.4.2 姿态采集装置的设计 10
2.5 GPS数据的获取 12
2.6 控制界面的设计与数据的传输 13
2.7 本章小结 16
第3章 系统软件设计与功能实现 17
3.1 电机的控制 17
3.2 LCD人机交互设计 20
3.3 姿态原始数据的获取 22
3.4 姿态角的解算 26
3.5 GPS数据的获取 30
3.6 本章小结 32
第4章 系统测试 33
4.1 航行控制实验 33
4.2 姿态采集测试 34
4.3 航行数据采集 37
4.4 本章小结 38
第5章 总结与展望 39
参考文献 40
附录A 船控电机指令 41
致谢 43
[版权所有:http://DOC163.com]