
智能搬运机器人

智能搬运机器人(论文16000字)
摘要:本文通过研究智能搬运机器人现状设计出一种基于单目摄像头识别物件并带有多自由度机械臂的智能搬运机器人。主要研究内容如下:首先上位机端简化了物件坐标的定位,采用二维平面坐标定位方式。并对二维码识别的Zbar算法进行优化,加快了二维码识别的速度。结合OpenCV算法库在Visual Studio编程软件中编写图像处理算法和机器人通信上位机界面。其次选取Ardunio控制器作为机器人的控制核心。DC直流减速电机和L298N型直流电机驱动器以及TCRT5000红外循迹模块,在控制程序作用下,实现行走转向。通信方面则采用ESP8266作为和上位机的通信工具。抓取则采用四个SG90舵机构成四自由度的机械臂实现对物体的抓取,并对机械臂的运动学进行分析,以便实现程序上对机械臂的准确控制。最后对整个系统进行搭建并对实物进行连接,经测试该智能搬运机器人系统实现了单目对物件的抓取与识别,简化了物件定位的计算,为单目机器人的抓取提供了新的思路。
关键词:图像处理;OpenCV;搬运机器人;Ardunio;机械臂
Intelligent Handling Robot
Abstract:In this paper, an intelligent handling robot with multi-degree-of-freedom manipulator based on monocular camera is designed by studying the status quo of intelligent handling robot. The main research contents are as follows: Firstly, the upper computer simplifies the object coordinate positioning, and adopts the two-dimensional plane coordinate positioning method. The Zbar algorithm of two-dimensional code recognition is optimized to accelerate the speed of two-dimensional code recognition. Combining OpenCV algorithm library and Visual Studio programming software, image processing algorithm and upper computer interface of robot communication are compiled. Secondly, the Ardunio controller is selected as the control core of the robot. DC DC deceleration motor, L298N DC motor driver and TCRT5000 infrared tracking module can realize walking and steering under the control program. In the aspect of communication, ESP8266 is used as the communication tool with the host computer. Four SG90 rudder mechanisms are used to form a Four-Degree-of-Freedom manipulator to grasp the object, and the kinematics of the manipulator is analyzed in order to realize the accurate control of the manipulator in the program. Finally, the whole system is built and connected with the object. After testing, the intelligent handling robot system achieves monocular object capture and recognition, simplifies the calculation of object location, and provides a new idea for the capture of monocular robot.
Key words:image processing; OpenCV;handling robot; Ardunio; manipulator
[资料来源:www.doc163.com]
目录
1绪论 1
1.1研究背景 1
1.2国内外研究应用现状及发展趋势 2
1.3本论文的主要工作及章节安排 3
1.3.1主要工作 3
1.3.2论文结构 3
2系统设计与方案论证 5
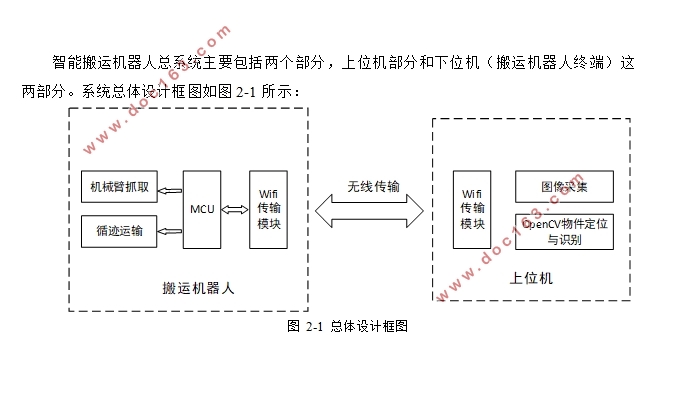
2.1系统总方案设计 5
2.2上位机软件功能结构 5
2.3硬件设计方案 6
2.2.1单片机主控芯片的选择 6
2.2.2 WIFI模块的设计 7
2.2.3循迹模块的设计 7
2.2.4机械臂模块的设计 7
2.2.6电源模块的设计 7
2.3本章小结 8
3系统硬件设计与实现 9
3.1智能搬运机器人硬件设计原理 9 [来源:http://www.doc163.com]
3.2主要单元电路设计 10
3.2.1单片机主控电路 10
3.2.2稳压电路设计 10
3.2.3循迹模块电路 11
3.2.4 L298N驱动电路 11
3.2.5 WIFI模块电路 12
3.2.6舵机模块电路 12
3.3本章小结 13
4机械臂的运动学分析 14
4.1机械臂结构分析 14
4.2机械臂正运动学分析 14
4.2机械臂正运动学Matlab仿真 16
4.3本章小节 18
5程序设计 19
5.1上位机主程序设计 19
5.1.1二维码矫正程序设计 20
5.1.2二维码识别程序设计 21
5.1.3物件定位算法分析与程序设计 22
5.2下位机主程序设计 24
5.2.1红外循迹程序设计 25
5.2.2机械臂驱动程序设计 26
5.2.3无线传输程序设计 26
5.3本章小结 28
6系统测试 29
6.1系统软件测试 29
6.2系统硬件测试 33
6.3本章小结 36
7总结与展望 37
参考文献 38
致谢 40 [来源:http://Doc163.com]