
基于单片机的智能车控制系统的设计
基于单片机的智能车控制系统的设计(任务书,开题报告,论文12000字)
摘要
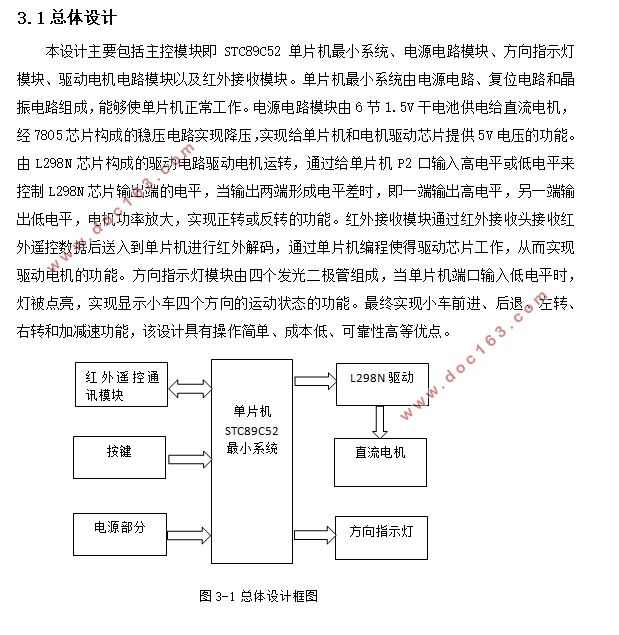
电子技术发展得越来越快,红外遥控成为一种日常生活中应用广泛的通讯方式,具有规模小,功耗小,成本低,功能强等特点。智能化作为当代电子产业的新趋势,是今后的发展方向。本设计主要包括STC89C52单片机最小系统、电源电路模块、电机驱动电路模块、红外接收模块以及方向指示灯模块。电源电路模块由6节1.5V干电池组成,经7805芯片构成的稳压电路实现降压,实现给单片机和电机驱动芯片供电的功能。由L298N芯片构成驱动电路驱动电机运转,此时电机功率放大,实现正转或反转的功能。红外接收模块通过红外接收头接收红外遥控数据后送入到单片机进行红外解码,通过单片机编程使得驱动芯片工作,从而驱动电机。方向指示灯模块由四个发光二极管组成,当单片机端口输入低电平时,灯被点亮,显示小车四个方向的运动状态。该设计能够使小车完成前进、后退、左转、右转和加减速的任务。
关键词: 红外遥控 单片机STC89C52 电机驱动L298N 发光二极管
Intelligent vehicle control system based on single chip microcomputer
Abstract
Electronic technology is developing faster and faster,infrared remote control has become a relatively wide range of communication and remote control means, with a small size, low power consumption, low cost, strong function and so on. Intelligent as a new trend of modern electronic products, is the future direction of the development of the electronics industry. The design includes STC89C52 MCU minimum system, the power supply circuit module, the motor drive circuit module, infrared receiving module and the direction indicator light module. The power supply circuit module is composed of 6 sections of 1.5V dry batteries, and the voltage regulator circuit which is composed of 7805 chips is realized to realize the function of reducing blood pressure and realizing the power supply of the single chip microcomputer and the motor drive chip. The driving circuit is composed of a L298N chip to drive the motor to run, at this time, the power of the motor is amplified, and the function of the positive rotation or the reverse rotation is realized.Infrared receiving module through the infrared receiving head infrared remote control receiver data sent to the microcontroller decoding infrared MCU, The driving chip is driven by the single chip computer programming. The direction indicator light module is composed of four light emitting diodes, when a single chip computer port is input, the lamp is lit, and the movement state of the four directions of the vehicle is displayed. The design can make the car to complete forward, backward, turn left, turn right and acceleration and deceleration of the task.
[来源:http://www.doc163.com]
Key words:Infrared remote control; Single chip microcomputer STC89C52; Motor drive L298N; LED
本论文共分为六章:
第一章:绪论:介绍课题研究的背景和意义,以及智能小车的研究现状;
第二章:系统的方案选择:从主控模块、遥控方式、电机的分类、电机驱动芯片、电源电路模块和车体等方面进行方案的比较和选择,根据设计需要选出最佳方案;
第三章:硬件电路设计:根据选定的方案,进行系统的硬件电路设计,先从电路总体开始设计和分析,再从各个模块进行设计;
第四章:软件程序设计:首先介绍了系统软件设计的思路并画出主程序流程图,接着是各子程序的设计与实现,分别对红外接收模块设计、电机驱动模块设计、指示灯显示模块设计的介绍;
第五章:调试:分别对硬件和软件调试两部分进行总结和概括,分析并解决调试过程遇到的每一个问题;
第六章:结论:解决在系统设计环节中遇见的问题,并总结经验心得。
[资料来源:https://www.doc163.com]
目录
摘要 I
Abstract II
第一章绪论 1
1.1引言 1
1.2研究现状 1
1.3论文组织结构 3
第二章智能小车方案选择 4
2.1主控模块选择 4
2.2遥控方式的选择 4
2.3电机的选择 4
2.4电机驱动芯片的选择 5
2.5电源选取 5
2.6车体的选择 6
第三章硬件电路设计 7
3.1总体设计 7
3.2主控制模块 7
3.2.1电源电路 8
3.2.2晶振电路 9
3.2.3复位电路 9
3.3指示灯电路设计 10
3.4驱动模块的设计 11
3.5红外接收模块的设计 12
第四章软件程序设计 13
4.1整体程序设计 13
4.2系统程序流程图 13
4.2.1中断服务程序 14
4.2.2红外接收模块 15
4.2.3电机驱动模块 16
4.2.4指示灯显示模块 17
第五章调试 18
5.1硬件调试 18
5.2软件调试 19
第六章结论 20
参考文献 21
致谢 23
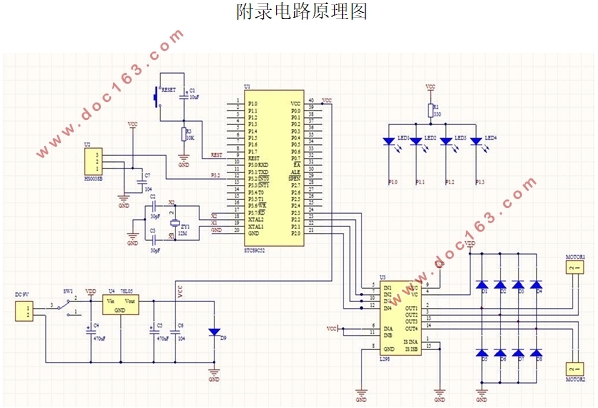
附录电路原理图 24