
基于单片机控制的自动调平工作台设计

基于单片机控制的自动调平工作台设计(选题审批表,任务书,开题报告,中期检查表,论文说明书25000字,CAD图2张)
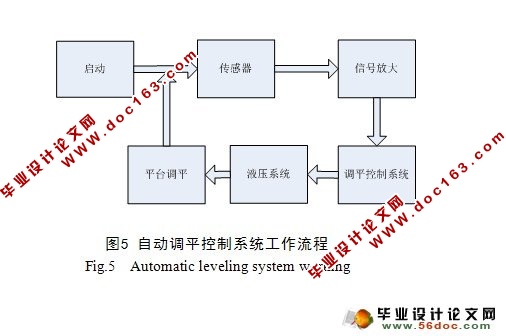
摘 要: 自动调平平台是一种广泛应用于军事、机械、医疗等领域的支撑系统,目前国内外对自动调平平台系统方面的研究有限。通过毕业设计,设计一种基于单片机的自动调平平台,运用于果园采摘系统。系统采用传感器感知平台的状态,并将传感器感知的信号传输给单片机,单片机处理信号并控制液压系统的支脚升降达到实时调平的目的,满足了果园采摘平台灵活可靠地实时自动调平需求。
关键词:自动调平,单片机,液压,支撑,传感器
Design of Automatic Levelling Flatform Based on MCU
Abstract: Automatic leveling platform is a kind of backup system which is widely used in military mechanical and medical field,and there is limited study at home and abroad now.In my graduation project,I'd like to design a kind of automatic leveling platform which is based on single chip computer and use it in garden pick system.This system adopt sensor to sense the state of the platform,and then deliver the message which is felt by the sensor to single chip computer to let it deal with the message and make automatic leveling come true through controlling the foot of hydraulic pressure system ,which makes automatic leveling flexible and reliable. [资料来源:www.doc163.com]
Key words: single chip microcomputer; hydraulic; automatic levelling; balance system; sensor
研究内容:
设计并制作基于51系列单片机的三点自动调平平台,由于技术和硬件等条件的限制,本次毕业设计以三点调平平台为设计内容。要求能够在一定的环境实现自动调平,根据环境角度的改变反馈给传感器,并在短时间内通过三个液压缸升降实现平台的自动调节,从而达到自动调平的目的。该系统主要包含以下内容:
[1] 微处理器单元
利用MCS-51系列单片机进行各项工作的处理,包括信号的采集和数据的传输以及对控制对象的控制。
[2] 按键控制模块
利用按键实现功能的开启及关闭,以及功能的切换。
[3] 感知传感系统
感知平台的水平状态及液压缸的状态,送至未处理单元进行处理,并将微处理的的反馈结果送达液压系统执行。
[3] 液压系统
实现三个液压缸的升降,从而控制平台的水平。
发挥内容:
快速感知环境变化并快速调平。
[资料来源:www.doc163.com]
目 录
摘要……………………………………………………………………………………1
关键词…………………………………………………………………………………1 [资料来源:http://Doc163.com]
1 前言…………………………………………………………………………………1
1.1 研究的目的意义……………………………………………………………1
1.2 国内外研究现状及存在的问题……………………………………………2
2自动调平系统分析……………………………………………………………………4
2.1 自动调平系统分类…………………………………………………………4 [资料来源:https://www.doc163.com]
2.2 自动调平系统的基本构造…………………………………………………5
2.3 自动调平系统控制原理分析………………………………………………6
2.4 非接触式自动调平控制系统的分析与比较………………………………7
2.4.1 超声波自动调平控制系统分析……………………………………8
2.4.2 激光自动调平控制系统分析………………………………………8
2.4.3 比较结论……………………………………………………………8 [资料来源:https://www.doc163.com]
2.5 影响自动调平控制系统精度的几个因素………………………………9
3 自动调平控制系统的设计…………………………………………………………10
3.1 自动调平控制方案的确定…………………………………………………10
3.1.1 车载自动调平控制系统的要求……………………………………10
3.1.2 车载自动调平控制系统的方案……………………………………11
3.2 自动调平液压系统的工作原理……………………………………………14 [资料来源:http://doc163.com]
3.3 控制系统的数学模型及控制算法的确定…………………………………15
3.4.1 控制系统的数学模型………………………………………………15
3.4.2 控制算法的设计……………………………………………………17
3.4 系统的抗干扰措施及控制参数的确定……………………………………19
3.4.1 系统的抗干扰措施…………………………………………………19 [来源:http://www.doc163.com]
3.4.2 关键控制参数的确定………………………………………………19
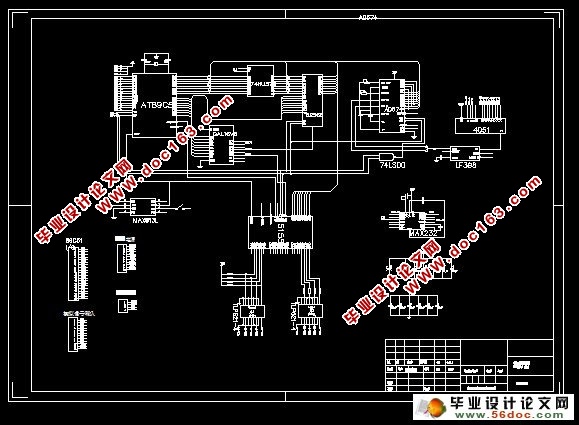
4 系统硬件设计………………………………………………………………………21
4.1 系统组成及工作原理………………………………………………………21
4.2 车载自动调平控制系统的传感器选择……………………………………22
4.2.1 传感器的选择原则…………………………………………………22 [来源:http://Doc163.com]
4.2.2 超声波传感器的测距原理及精度影响因素………………………22
4.2.3 超声波传感器的选择………………………………………………24
4.3 电磁阀的控制模式…………………………………………………………25
4.4 开关量输入设计……………………………………………………………26
4.5 信号处理模块………………………………………………………………28 [资料来源:http://doc163.com]
4.6 数据存储模块………………………………………………………………32
4.7 I/O口的扩展电路……………………………………………………………33
4.8 系统状态显示模块…………………………………………………………34
4.9 LED显示模块…………………………………………………………………34
4.10 后向通道设计……………………………………………………………36
[资料来源:http://www.doc163.com]
4.11 控制面板设计……………………………………………………………37
4.12 外围电路及电源模块设计………………………………………………38
4.12.1 时钟电路设计……………………………………………………38
4.12.2 复位电路设计……………………………………………………38
4.12.3电源电路设计………………………………………………………39
5 结论…………………………………………………………………………………39 [资料来源:http://Doc163.com]
参考文献 ……………………………………………………………………………40
致谢……………………………………………………………………………………41