
四自由度搬运机械手及其PLC控制系统设计

四自由度搬运机械手及其PLC控制系统设计(毕业论文16000字,CAD图纸2张,答辩PPT)
摘要
本设计为四自由度机械手,主要负责数控车床的自动上下料,可以抓取毛培放入车床的三爪卡盘中加工,再将成品拿出放入成品区上。要求动作迅速,定位精确,可以通过对程序的修改实现在行程范围内的任意点定位。具有手动和自动功能。
本设计主要系统地设计了搬运机械手的结构,驱动系统和控制系统,着重对控制系统进行设计。在驱动方面采用气压传动,有传动迅速,无污染等优点,控制方面,采用可编程控制器(PLC)控制,结合PID算法,提高了气动系统的定位精度,弥补了气动系统在这一方面的不足。
关键词:四自由度;机械手;气动;PLC;PID
Carrying manipulator and its’ control system design
ABSTRACT
This designing is the four degree of freedoms; the main usage is up and down materials automatic in the CNC lathe. It can carry the materials to the lathe, take it out after the materials accomplish machining and put to the finish product area. The system request fast transmission and high fix precision, could fix in any point confine to its route through alter its program. Had the function of automatic and manual.
This design main system designed to carrying manipulator structure, driving system and control system, focuses on the control system design. It was drive by the pneumatic transmission, it had advantages of fast transmission and nothing pollute etc. It used the Programmable Logic Controller (PLC), combine with the PID arithmetic, increased the fix precision of the pneumatic transmission, made up its’ weakness.
Key words:Four degree freedoms; manipulator; Pneumatic transmission; PLC; PID
[来源:http://www.doc163.com]
目录
1 绪论 1
1.1 课题背景及研究现状 1
1.2 机械手的研究意义及其本身优点 2
1.2.1 机械手的研究意义 2
1.2.2 机械手本身的优点 2
1.3 论文的主要研究内容 3 [资料来源:Doc163.com]
1.4 PID控制的介绍 3
1.4.1 PID的原理和特点 4
1.5 本课题主要的研究内容和方法 5
2 机械手的整体设计 6
2.1 设计要求 6
2.2 总体方案设计分析 6
2.2.1 搬运机械手的组成 6
2.2.2 机械手各部分的分析 7
2.2.3 搬运机械手的运动及驱动方式 8
2.3 本章小结 10
3 基本参数及驱动系统设计 10
3.1 基本参数 11
3.1.1 数控车床基本参数 11
3.1.2 机械手基本参数设定 11
3.2 伸缩臂的设计 12
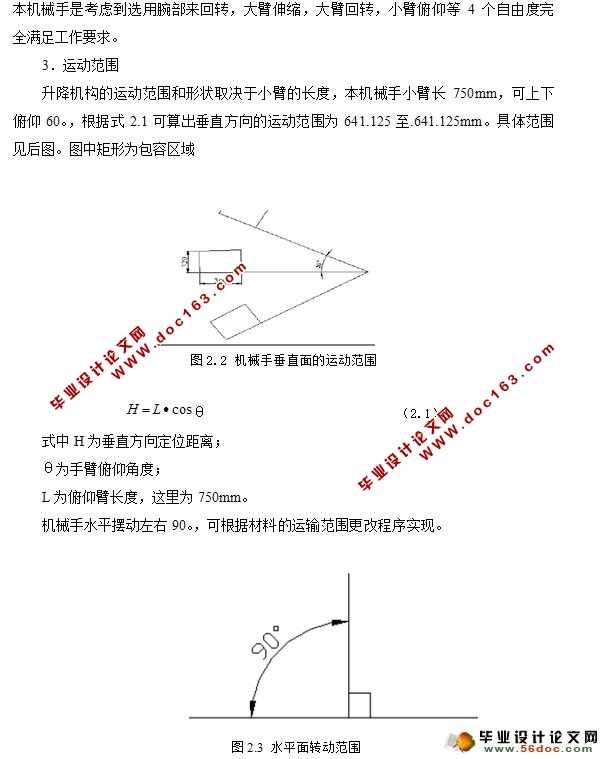
3.3 俯仰臂的设计 13
3.4 手爪回转的设计 14
3.5 手爪设计 15
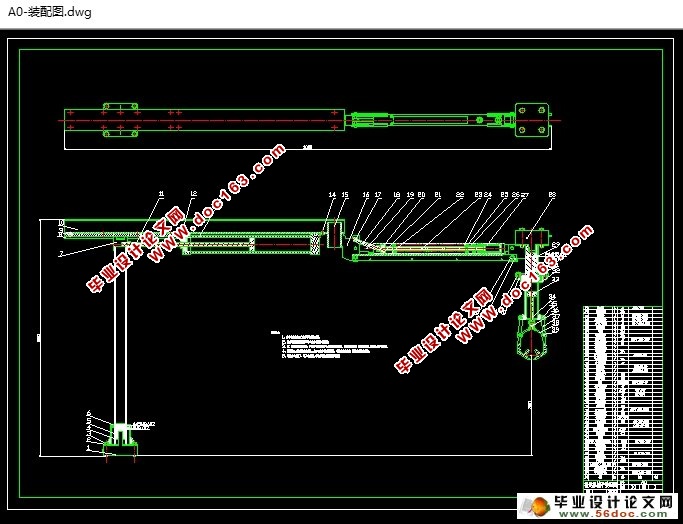
3.6 总体外观 15
3.6.1 外观图简图 16
3.6.2 气压原理设计图截图 16
[来源:http://www.doc163.com]
3.7 各气动元件的选型 17
3.7.1 电—气比例阀的选型 17
3.7.2 气缸的选型 18
3.8 本章小结 19
4 运机械手控制系统设计 19
4.1 机械手控制系统方案分析 19
4.1.1 机械手的动作流程 19
4.2 控制系统的硬件设计 22
4.2.1 PLC的选型 22
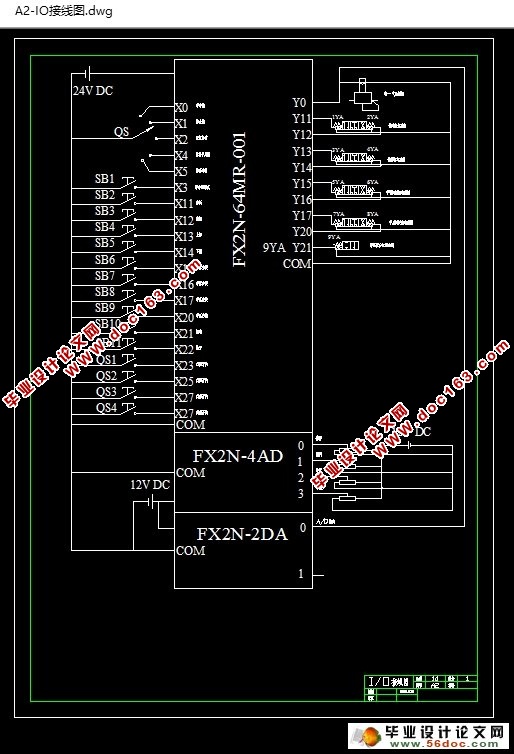
4.2.2 硬件I/O口的分配 23
4.2.3 传感器的选择 24
4.2.4 系统硬件连线 25
4.3 控制系统的软件设计 26
4.3.1 PID控制算法的实现 26
4.3.2 控制系统的PID算法 27
4.4 各参数的整定 28
4.4.1 手臂伸缩气缸的PID参数整定 29
4.4.2 手臂俯仰缸的PID参数整定 30
4.4.3 手臂回转缸的PID参数整定 32
4.4.4 手爪回转缸的PID参数整定 33
4.5 本章小结 34
5 控制系统程序设计 34
5.1 初始程序 34
5.2 手动程序设计 35
5.3 自动控制程序设计 36
5.3.1 步进流程图 38
5.4 本章小结 40
6 总结与展望 40
6.1 总结 40
6.2 展望 40
参考文献 42
致谢 45
附录 46 [资料来源:Doc163.com]