
基于单片机的多路舵机遥控机器人
基于单片机的多路舵机遥控机器人(任务书,开题报告,外文翻译,论文说明书10700字)
摘 要
随着科技的发展,机器人不仅能提供高精度和快速的完成工作,而且可以完成人所不能完成的任务。本文通过分析机器人的结构和工作原理,设计一种基于51系列单片机的机器人。本课题中主要是利用51系列单片机为核心架构,以单片机控制多路舵机为基础思路,实现对多路舵机的同时控制。通过对多路舵机的控制,实现机器人的动作。一共采用五路舵机:两路360度舵机为驱动舵机,用作控制机器人的前后左右行动;三路9G小舵机,分别控制两只手和头部,幅度为正负90度,从而实现头部和手部的转动。
关键词:单片机 机器人 多路舵机
Multi-way steering remote control robot
Abstract
With the development of technology, Robot can not only provide high precision and rapid completion of the work, but also can do the task that humanity have no able to complete. Through the analysis of the structure and working principle of robot, I decide to design a robot which is based on 51 series MCU.The 51 series single-chip microcomputer would be mainly used as the core chip. The robot would be equipped with five road steering gear in total, two of which are used for the movement of robot, three of which are 9 used to control the movement of hands and head. [资料来源:http://www.doc163.com]
Key words: Single Chip Microcomputer; robot; Multi-way steering gear
[资料来源:https://www.doc163.com]
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1 设计背景与意义 1
1.2 设计研究内容 1
第二章 多路舵机遥控机器人的分析与选择 2
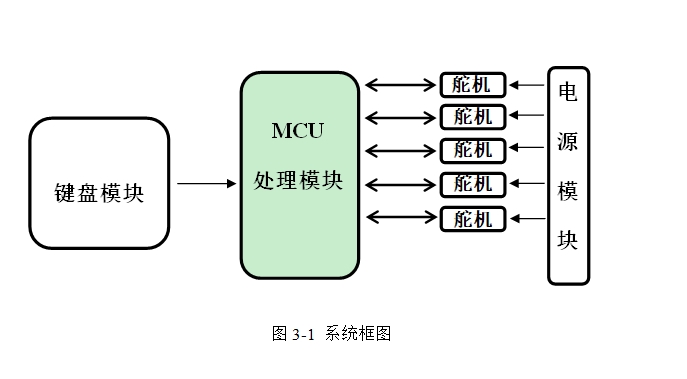
2.1 模块构成 2
2.1.1 移动模块 2
2.1.2 控制模块 2
2.1.3 中央处理模块 2
2.2 遥控机器人的方案选择 2 [版权所有:http://DOC163.com]
2.2.1 动力系统 3
2.2.2 移动方案 3
2.2.3 动作功能 4
2.2.3 核心系统 4
2.2.4 控制模块 4
第三章 系统硬件设计 5
3.1 系统硬件概述 5
3.2 模块电路设计 6
3.2.1 单片机最小系统 6
3.2.2 系统电源 6
3.2.3 键盘模块 7
3.2.4 舵机模块 8
3.2.5 整机系统仿真 9
第四章 系统软件设计 11
4.1 系统软件设计概述 11
4.1.1 PWM信号产生程序原理 11
4.1.2 机器人移动程序原理 11
4.1.3 机器人动作程序原理 12
4.2 各模块程序设计 13
4.2.1 延时 13
4.2.2 定时器初始化 13
4.2.3 PWM信号发生 13
4.2.4 按键扫描 13
4.2.5 舵机功能实现 13
4.2.6 舵机复位 14
4.2.7 机器人运动 14
第五章 系统制作调试及分析 15
5.1 硬件设计 15
5.1.1 系统仿真 15
5.1.2 硬件电路制作 16
5.1.3 整机硬件加工 17
5.2 系统调试 19
5.2.1 电源模块调试 19
5.2.2 舵机调试 19
结束语 21
参考文献 22
致谢 23
附录 24