
基于STM32的智能双轮平衡车控制系统设计

基于STM32的智能双轮平衡车控制系统设计(任务书,开题报告,论文16000字)
摘 要
平衡车作为一种新颖的交通工具,具有便携,低功耗,无污染,无噪声等诸多优点,一经问世,便逐渐受到越来越多人的青睐。近年来平衡车逐步的市场化,并在各种领域得到应用,给人们生活和工作带来便利的同时,其存在的一些安全问题也是不容忽视的,而较容易出现问题的原因之一是其控制系统的鲁棒性能较弱。平衡车的应用,最核心的技术在于控制部分。本文旨在设计一款基于STM32的双轮平衡车,以平衡车的控制系统设计为主要研究内容,设计相应的控制算法,以期望提高系统的鲁棒性能。设计的正文部分从内容上细分为硬件设计和软件设计两部分。硬件部分详细论证了各模块的实现原理、器件选型和参数配置,软件部分仔细分析了系统功能的实现逻辑、控制思路及算法流程。系统使用STM32F103C8T6作为最主要的处理单元,可以快速地将信号采集出来,同时对数据进行滤波处理,保证数据传输的实时性、准确性。实物测试结果表明,得益于STM32的高速处理能力,本文设计的平衡车系统鲁棒性能较高。系统的控制由软件实现,具有便捷性、实用性。
关键词:双轮平衡车STM32控制系统鲁棒性
Design of Control System of Intelligent Two-wheeled BalancedCarBased on STM32 [版权所有:http://DOC163.com]
Abstract
As a new means of transport, with a portable、low power consumption、no pollution、no noise and many other advantages, once available, balance car is popular with more and more people of all ages gradually.The balance of vehicles gradually market-oriented in recent years, and have been applied in a variety of areas to bring convenience to people's lives and work,while some of its existing security problems can not be ignored at the same time, and one of the reasons more likely to be the problem is its robust performance of the control system is weak.The core technology lies in the control part of the application of the balanced car.This acticle is intended to design a two-wheeled balanced car based on STM32.The main research content is to design the control system of the balanced car, and design the corresponding control algorithm,which expects to improve the robustness of the system.The part of the text is subdivided into hardware configuration and software design.The hardware part demonstrates the realization principle, the device selection and the parameter disposition of each module in detail,and the software part analyzes the realization logic, the control thought and the algorithm flow of the system function carefully.System using STM32F103C8T6 as the most important processing unit,which can collect the signal quickly, while the data is filtered to ensure real-time and accuracy of the data transmission.The physical test results show that due to the high speed processing capability of STM32,the robustness of the balanced car system is high.The system is controled by the software,which is convenient and practical. [资料来源:https://www.doc163.com]
Key words:two-wheeled balancedcar; STM32; control system; robustness

目 录
摘要 I
Abstract II
第一章 引言 1
1.1 设计背景 1
1.2 设计目的与意义 1
1.3 设计内容与重点简介 1
1.4论文章节安排 2
第二章 平衡小车设计原理 3
2.1 平衡小车运动原理 3
2.2 小车直立PD控制原理 3
2.3小车倾角与角速度测量原理 5
2.4小车速度PID控制原理 6
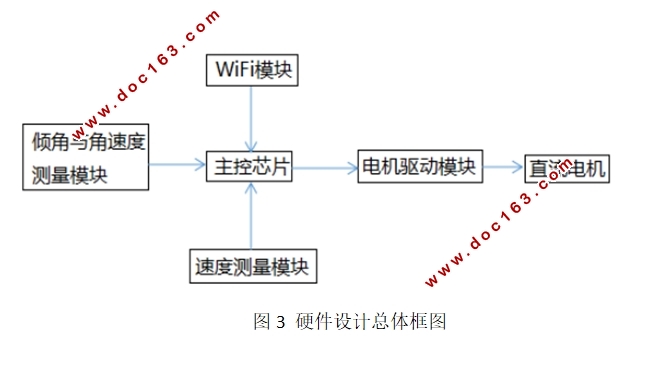
第三章 系统硬件设计 9
3.1 主控芯片的选择 9
3.2 倾角与角速度测量模块设计 10
3.3速度测量模块设计 12
3.4电机驱动模块设计 13
3.5稳压模块设计 14
3.6WiFi模块设计 15
第四章 系统软件设计 17
4.1 平衡系统软件设计 17
4.2卡尔曼滤波的设计 18
4.3小车直立控制设计 20
4.4小车速度控制设计 21
4.5控制软件的设计及其连接 22
4.5.1控制软件的设计 23
4.5.2 上位机与下位机的连接 26
第五章 系统调试与分析 29
5.1 系统硬件电路调试 29
5.2 控制系统PID参数整定 30
5.2.1 小车直立控制PD参数整定 30 [资料来源:http://doc163.com]
5.2.2小车速度控制PI参数整定 31
5.3 双轮平衡小车的动态调试 31
总结 34
参考文献 35
致谢 36
附录 37