
一种循迹避障小车的研究与设计

一种循迹避障小车的研究与设计(13000字)
摘要:本文是一种循迹避障车的研究与设计。循迹避障小车是传感器,单片机,电机驱动器等技术的组合,实现了预先设计的模式。它还能够自动实施高科技技术,无需人为控制即可循迹避障。就目前而言,这项技术已经在无人驾驶机动车、仓库以及服务机器人等多个相关领域得到了应用。
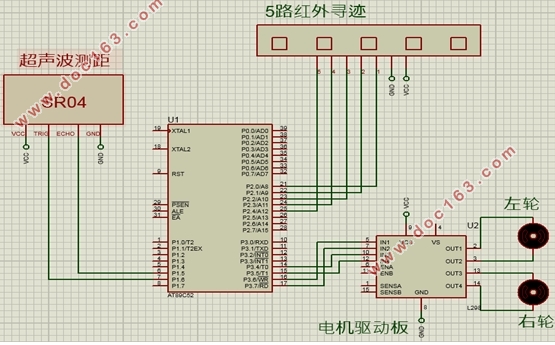
该文章中设计制造的是循迹避障小车,该小车的控制芯片是STC89C52单片机,对其加上红外光电传感装置,用来筛选白色地面上的黑色的轨迹,运用超声波传感装置,可以达到探测轨迹上的障碍物的目的,并将地面的检测信号馈送到单片机,并且单片机分析收集的信号。调整汽车的转向,实现自动跟踪和避障。其中,运用L298N驱动电路来将小车进行驱动,运用单片机输出的PWM波可以对该小车的速度进行控制。
关键词:STC89C52单片机;红外光电传感器;超声波传感器;L298N
Research and design of a tracking obstacle avoidance vehicle
Abstract:This paper is a research and design of tracking obstacle avoidance vehicles. The tracking obstacle avoidance car is a combination of sensors, microcontrollers, motor drives and other technologies to achieve a pre-designed mode. It also automates the implementation of high-tech technology to avoid obstacles without human control. For now, this technology has been applied in many related fields such as driverless vehicles, warehouses and service robots.
Designed and manufactured in this article is a tracking obstacle avoidance car, the control chip of the car is STC89C52 single-chip microcomputer, plus infrared photoelectric sensor device, used to screen the black track on the white ground, using ultrasonic sensing device, can The purpose of detecting the obstacle on the trajectory is reached, and the detection signal of the ground is fed to the single chip microcomputer, and the collected signal is analyzed by the single chip microcomputer. Adjust the steering of the car to achieve automatic tracking and obstacle avoidance. Among them, the L298N drive circuit is used to drive the car, and the speed of the car can be controlled by using the PWM wave output by the single chip microcomputer.
Keywords:STC89C52 single chip microcomputer; Infrared photoelectric sensor;Ultrasonic sensor;L298N
[资料来源:http://www.doc163.com]
目 录
第一章 绪论 1
1.1智能小车的意义和作用 1
1.2国内外研究现状 2
1.3论文研究内容与主要结构 2
第二章 方案设计与论证 3
2.1车体设计 3
2.2电机驱动设计 3
2.2.1电机选择 3
2.2.2驱动选择 3
2.2.3 H桥式电路工作原理 4
2.2.4 PWM调速技术 5
2.3循迹模块 5
2.3.1光电传感器的工作原理 5
2.3.2光电传感器的分类和工作方式 5
2.3.3光电传感器的选择 6
2.4避障模块 6
2.4.1超声波测距的原理 6
2.4.2超声波传感器的分类 6
2.4.3超声波测距特点 6
2.4.4超声波模块选择 7
2.5 主控系统 8
2.5.1方案 8
2.5.2 ST89C52单片机的介绍 8
2.6电源模块 10
第三章 硬件设计 11
3.1总体设计 11
3.2驱动电路设计 11
3.3信号检测模块电路设计 12
3.3.1循迹模块信号检测电路 12
3.3.2避障模块信号检测电路 13
3.4主控电路设计 13
第四章 软件设计 16
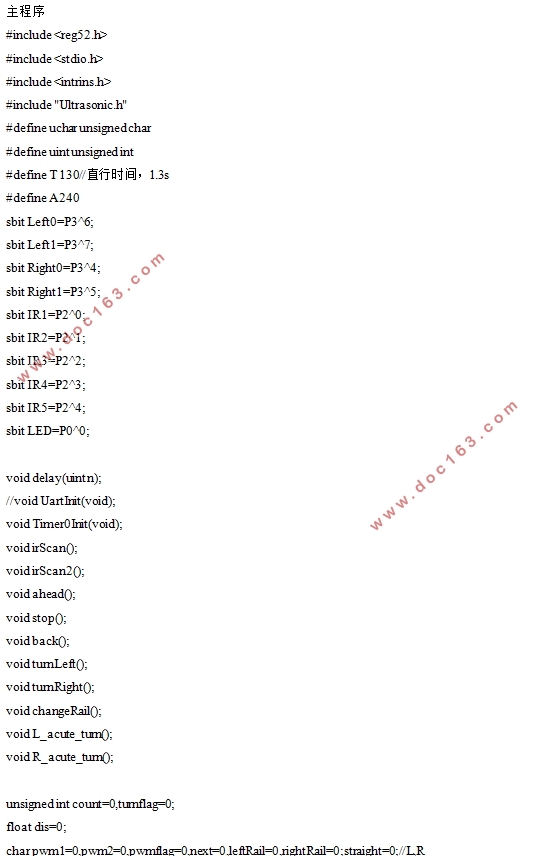
4.1主程序 16
4.2循迹模块 16
4.3避障模块 17
第五章 小车的安装与调试 18 [版权所有:http://DOC163.com]
5.1小车的安装 18
5.2小车的调试 18
第六章 结束语 19
参考文献 20
附录 21
致谢 30