
利用STM32单片机设计智能循迹小车(附程序清单)

利用STM32单片机设计智能循迹小车(附程序清单)(任务书,开题报告,论文11000字)
摘 要
本课题采用STM32单机片作为核心控制器,在此基础上增加各种接口电路板与传感器组成整个硬件系统。智能小车通过彩色OV7725摄像头捕捉动态画面以RGB格式的数据提取,并进行对单通道的提取,通过设置阈值同时进行软件二值化进行存储;根据所编写的算法进行对目标发光源的循迹,通过PID经典算法输出PWM信号控制小车的运动,使小车能达到迅速制动的功能;另外配置摇臂电机系统,利用单片机可以驱动摇臂电机实现自动灭灯功能;通过红外传感器进行距离的判定,以及实现避障、停车部分的功能;彩色摄像头单通道提取固定颜色的光,增强对目标的循迹能力。整个程序部分使小车达到闭环控制,让小车能自主循迹、灭灯。
关键词:智能小车 OV7725摄像头 STM32 PWM PID控制
Design of Intelligent Track Car Based on STM32 Microcontrollers
Abstract
In this paper, STM32 single chip is used as the core controller, and various interface circuit boards and sensors are added to constitute the whole hardware system.The intelligent car captures dynamic pictures by color OV7725 camera and extracts data in RGB format, which carries out single channel extraction, and stores them by setting threshold and software binarization at the same time. According to the algorithm, it traces the target light source, and outputs PWM signal by classical PID algorithm to control the car's movement, so that the car can achieve rapid braking. In addition, the rocker arm motor system is configured, and the rocker arm motor can be driven by single chip microcomputer to achieve automatic lamp extinguishing. The distance is judged by infrared sensor, and realize the functions of obstacle avoidance and parking, and extract the fixed color light from the single channel of color camera to enhance the tracking ability of the target. The whole program makes the car achieve closed-loop control, so that the car can track and turn off lights independently. [资料来源:https://www.doc163.com]
KEY WORDS: Intelligent car;OV7725 camera;stm32;PWM;PID controll
目 录
摘 要 I
Abstract II
目 录 III
第一章 绪论 1
1.1 课题研究背景 1
1.2 研究现状 1
1.3 小车设计方案 3
第二章 硬件电路设计 5
2.1 电源模块 5
2.1.1 舵机电源 5
2.1.2 5V直供电源 6
2.1.3 3.3V直流电源 6 [资料来源:http://Doc163.com]
2.2 单片机模块 7
2.3 摄像头模块 8
2.3.1 摄像头的选择 8
2.3.2 摄像头模块 9
2.4 方向舵机、驱动电机模块 11
2.4.1 电机、舵机选择 11
2.4.2 方向、运动控制模块 12
2.5 避障模块 15
第三章 软件系统设计 17
3.1 图像采集及处理算法 18
3.1.1 调用SCCB的方法 18
3.1.2 摄像头时序图 20
3.1.3 图像存取 21
3.1.4 图像采集及处理 22
3.2 速度与方向控制 24
3.2.1 PID算法 24
3.2.2 方向控制算法 25
3.2.3 运动过程算法 26
3.3 图像显示 29
第四章 调试与总结 30
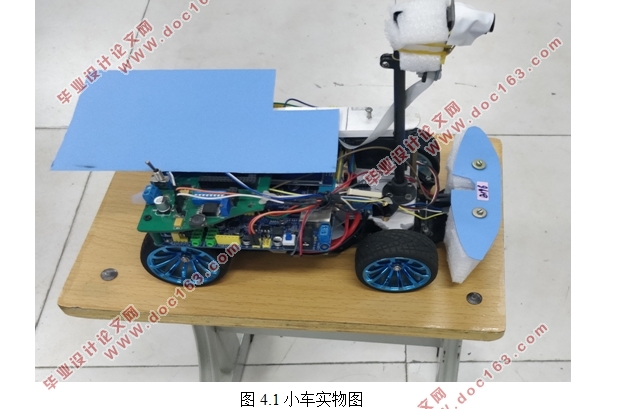
4.1 安装与调试 30 [来源:http://www.doc163.com]
4.2 出现的问题与其解决方法 31
4.3 总结 33
参考文献 34
附录 38
程序部分 39
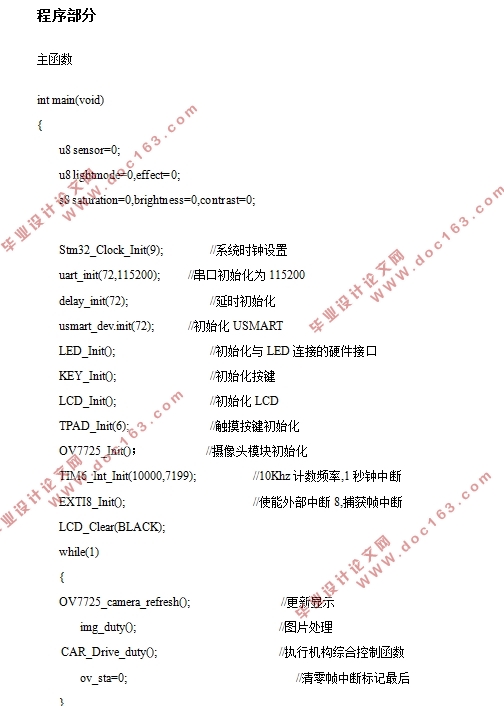
主函数 39
其他函数及配置参数 40
致谢 49 [资料来源:https://www.doc163.com]
上一篇:基于单片机的火灾智能报警设计(附程序代码,接线图,仿真)