
基于单片机的四轴飞行器设计
基于单片机的四轴飞行器设计(任务书,开题报告,外文翻译,论文14500字)
摘要
在飞行器高速发展的年代,各种各样的飞行器出现在人们的眼前,飞行再也不是人类的梦想,成为了能真实体验到的新型高效的运输,交通与探测方式。而四旋翼飞行器以其独特的较高的稳定性,简单的操作方法以及较小的体积和质量得到了越来越多的关注,在近几年得到了飞快的发展,不管是军用作战方面还是民用航拍方面等等都得到了广泛的应用。
本文以四旋翼飞行器的入门级学习为目标,实现四旋翼飞行器的软硬件设计,详细工作主要分为三部分:
1.学习四旋翼飞行器的运动模型,了解飞行器姿态的欧拉角表示法,四元数表示法,角速度,欧拉角与四元数的相互转换关系。
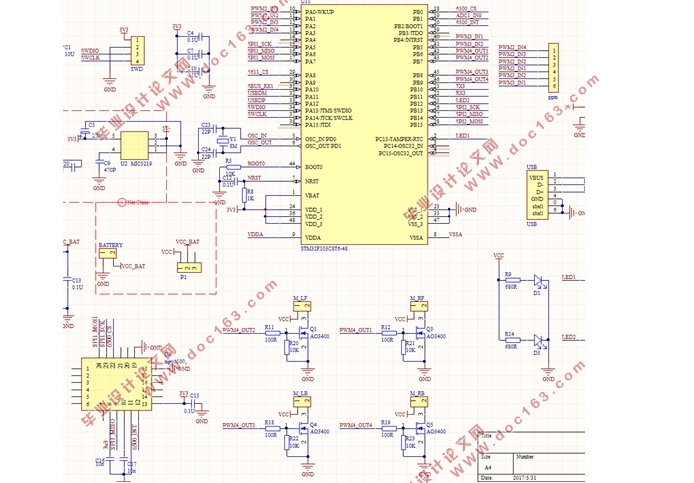
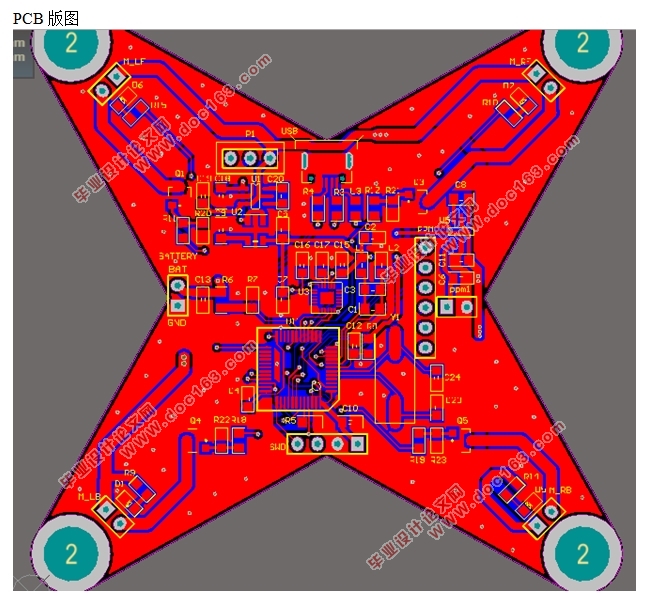
2.完成四旋翼飞行器的整体硬件电路设计,完成各模块的驱动程序设计。整体电路主要包括STM32最小系统模块、MPU6500传感器模块、电源模块、电机和电机控制模块以及无线通信模块等。驱动程序主要包括SPI通信、MPU6500读写、无线通信、电机PWM控制等。
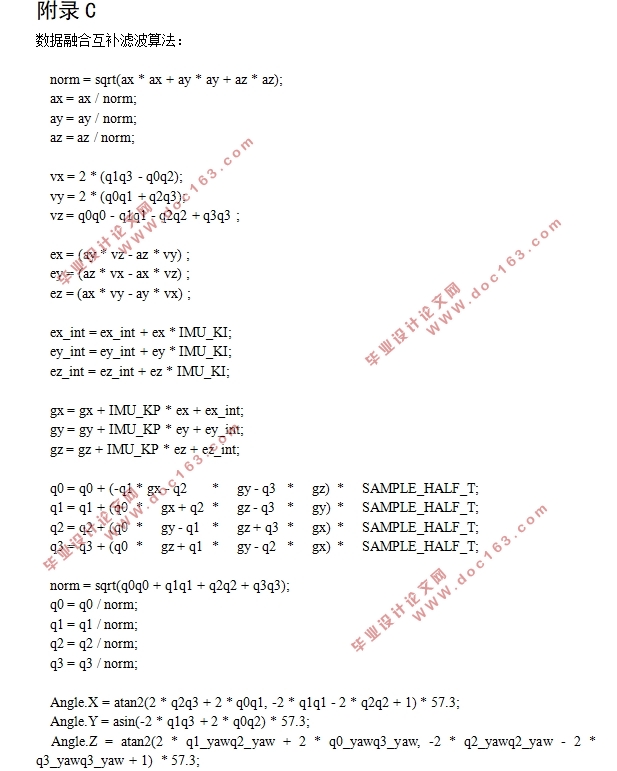
3.使用互补滤波算法来实现四旋翼飞行器的传感器数据滤波及姿态解算,使用PID控制算法来进行四旋翼飞行器的姿态控制。 [资料来源:http://www.doc163.com]
关键词:四旋翼飞行器,运动模型,MPU6500,互补滤波算法,PID控制算法
Abstract
In the era of rapid development of the aircraft, a variety of aircraft appear in front of people, the flight is no longer a human dream, has become a real experience to the new and efficient transport, transportation and detection methods. The quadrotors with its unique high stability, simple methods of operation and smaller size and quality has been more and more attention in recent years has been rapid development, whether it is military operations or Civil aerial aspects and so have been widely used.
In this paper, quadrotors entry-level learning as the goal, to achieve quadrotors hardware and software design, detailed work is divided into three parts:
1. Learn the dynamics model of the quadrotors, understand the Euler angle representation of the aircraft's attitude, the representation of the quaternion, the angular velocity, the relationship between the Euler angle and the quaternion.
2. Complete the quadrotors' overall hardware circuit design, complete the module driver design. The overall circuit mainly includes STM32 minimum system module, MPU6500 sensor module, power module, motor and motor control module and wireless communication module. The driver mainly includes SPI communication, MPU6500 read and write, wireless communication, motor PWM control and so on.
3. Using the complementary filtering algorithm to realize the sensor data filtering and attitude calculation of the four rotorcraft, the PID control algorithm is used to control the attitude of the four rotorcraft.
Key words: quadrotors;dynamic model;MPU6500;complementary filter algorithm;PID control algorithm
[资料来源:http://Doc163.com]
目录
第1章绪论 1
1.1 研究背景与意义 1
1.2国内外研究现状 1
1.3 本文的研究内容和组织结构 3
第2章四旋翼飞行器的理论 4
2.1 欧拉角 4
2.2 四元数 5
2.3 欧拉角与四元数的转换 5 [资料来源:http://www.doc163.com]
2.3.1 四元数转换为欧拉角 5
2.3.2 欧拉角转换为四元数 6
2.4 四旋翼飞行器姿态控制 7
2.5 本章小结 9
第3章硬件电路设计 10
3.1 总体电路 10
3.2 STM32最小系统 10
3.3 电源模块 11
3.4 MPU6500模块 12
3.5 电机驱动模块 13
3.6 串口通信模块 13
3.7 无线通信模块 14
3.8 本章小结 14
第4章系统软件设计 15
4.1 驱动程序 15
4.1.1 串口初始化 15
4.1.2 遥控器PWM信号捕获 15
4.1.3 电机PWM控制输出 16
4.1.4 MPU6500初始化及读写 17
4.2 姿态解算算法 19
4.3 PID控制算法 21
4.4 调试结果 23
4.5 本章小结 24
第5章总结与展望 25
5.1 总结 25
5.2 展望 25
参考文献 26 [来源:http://Doc163.com]