
基于子空间的缺失多视觉聚类

资料介绍:
基于子空间的缺失多视觉聚类(中文10000字,英文PDF)
摘要
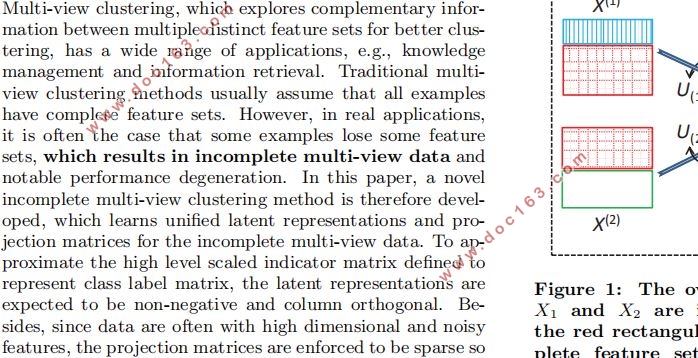
多视角聚类利用了多个不同的特征集之间的互补性来聚类,在知识管理和信息检索等领域已有广泛的应用。传统的多视角聚类方法通常假设所有视角都有完整的数据集。然而,在实际应用中,一些视角经常丢失一些特征集,导致缺失多视觉数据,多视角聚类方法的性能显著下降。因此本文提出了一种新型的多视角聚类方法,该方法对缺失多视角数据学习统一的子空间和投影矩阵。为了近似表示出高阶标签矩阵,要求子空间矩阵是非负的和列正交的。此外,由于数据往往具有高维和噪声性,因此在学习子空间时,投影矩阵必须是稀疏便于相关特征提取。同时,保留视角内部和视角间的数据结构将有助于进一步提高聚类性能。为此,本文提出了一种基于有效的优化策略和收敛聚类方法。大量的实验表明,本文的模型在各种环境下的性能都优于目前最先进的多视角聚类方法。
关键字:多视角聚类;不完整的多视角数据;功能选择;子空间学习;图正则化 [资料来源:www.doc163.com]
[版权所有:http://DOC163.com]
[版权所有:http://DOC163.com]