
获得串级控制系统所需闭环响应的PID控制器整定(含外文出处)

资料介绍:
获得串级控制系统所需闭环响应的PID控制器整定(含外文出处)(中文5000字,英文PDF)
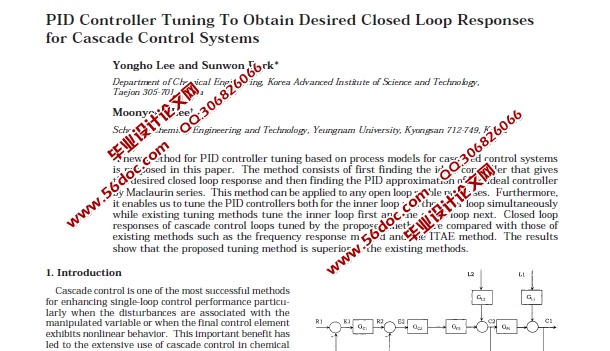
在本文中提出了一个基于过程模型的串联控制系统的PID控制器整定的新方法。这种方法是首先要找到理想的控制器,给出所需的闭环反应,然后找到由麦克劳林级数的PID近似的理想控制器。这种方法可以应用到任何开环稳定的过程。此外,它使我们能够同时调整PID控制器的内环和外环,而现有的调整方法是首先调整内环,然后再调整外环。将由所提出的方法调整的串级控制环路的闭环响应与现有的方法,(如频率响应的方法和ITAE方法)进行比较。结果表明,该调整方法比现有的方法更优越。
[资料来源:Doc163.com]
[来源:http://www.doc163.com]