
换热器温度控制方法研究
换热器温度控制方法研究(任务书,开题报告,外文翻译,论文11600字)
摘要
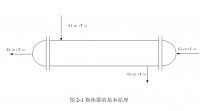
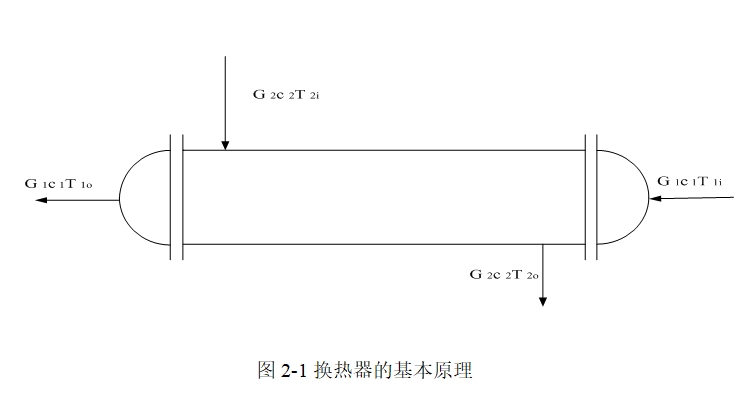
换热器是一种用来热量交换的工艺设备,在工业中应用十分广泛。换热器系统存在干扰强、大滞后、大惯性等特点。对换热器温度的研究极为重要。
我通过对换热器建模、控制器设计、仿真等,来选取最优控制方案。
控制器的选择时,如果仅用PID控制难以满足工艺对温度的要求,再使用能够对干扰进行补偿的前馈控制,系统的迟滞以及动态稳定性会得到大幅提升。然而PID控制的精准度有限,在干扰较大的系统中效果不佳,而模糊PID可以克服PID的缺陷使系统处在最佳状态。通过使用模糊PID与前馈的控制,系统的超调量、响应速度、稳定性、控制精度等方面表现优异。
关键词:换热器温度控制;PID控制;前馈;模糊控制
Abstract
Heat exchanger as a heat-exchanging equipment has been widely used in the field of industries.The heat exchange system that has a large disturbance,large time delay plant, large inertia.It is very important to research on the temperature of the heat exchanger.
The heat exchanger through modeling, controller design, simulation and to select the optimal control scheme.
[资料来源:http://doc163.com]
When we choose the controller.The traditional PID control often can not meet the technical requirements of temperature.If we use a feedforward control can compensate the interference,delay and dyamic stability of the system will be significantly enhanced. The accuracy is poor in conventional PID control, so the PID control is difficult to get ideal outcome in complex and disturbed system.But Fuzzy PID can overcome its defects and make the system in the best condition.By using fuzzy PID control with feedforward, overshoot, speed of response ,stability, control precision of the systerm has good performance.
Key words: heat exchanger temperature control; PID control; feedforward control;fuzzy control
[资料来源:http://www.doc163.com]
目 录
摘要 I
Abstract II
第一章 绪论 1
1.1 选题的背景及意义 1
1.2国内外研究现状与发展趋势 2
1.2.1国内外研究现状 2
1.2.2发展趋势 2
1.3 本文主要内容及安排 3
第二章 换热系统的数学模型 5
第三章 换热器的反馈-前馈控制 12
3.1反馈控制 12
3.1.1 PID控制器 12
3.1.1.1 控制规律 12 [资料来源:www.doc163.com]
3.1.1.2 PID控制规律 13
3.1.2反馈控制系统整定 13
3.1.3 反馈控制的仿真 15
3.2 前馈控制 16
3.2.1前馈控制原理和特点 16
3.2.2静态前馈系数Kd的整定 17
3.2.3 动态前馈时间常数T1、T2的整定 19
3.3 反馈与反馈-前馈控制结果的比较 23
第四章 模糊自整定PID及仿真 25
4.1参数自整定模糊-PID控制系统结构 25
4.2模糊控制器的语言变量设置 25
4.3定义输入、输出的隶属函数 27
4.4模糊规则的设定 30
4.5 确定量化因子 37
4.6 simulink仿真 37
第五章 总结与展望 41
参考文献 42
致谢 44
[资料来源:http://www.doc163.com]